
离线编程、3D 仿真和虚拟机器人控制都使构建和仿真机器人单元变得容易,而无需安装机器人。Yaskawa 提供 MotoSim ® EG-VRC 用于构建和仿真您的机器人单元。此外,如果您需要确保根据额定负载和有效载荷选择合适的机器人,请让 MotoSize ™ 确定合适的机器人型号。
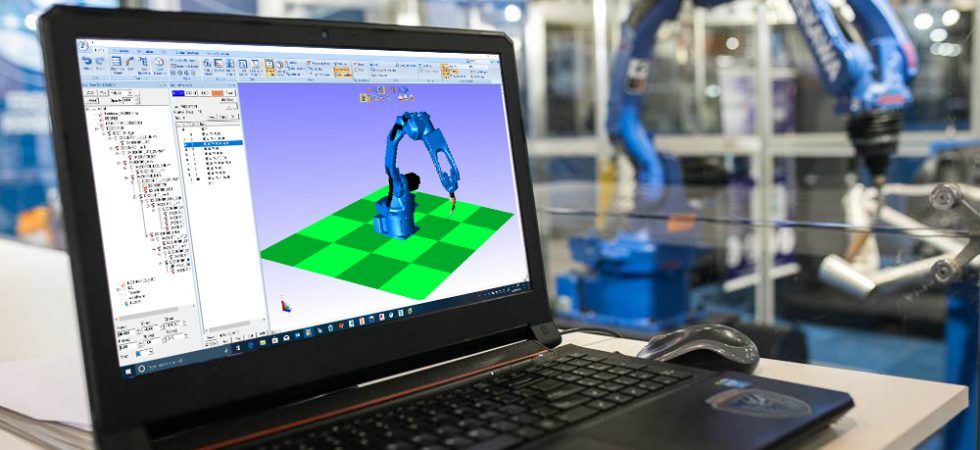
MotoSim EG-VRC (Enhanced Graphics Virtual Robot Controller) is designed for accurate offline programming of complex systems. With the virtual robot controller function, simulation software can be used for:
MotoSim EG-VRC(增强型图形虚拟机器人控制器)专为复杂系统的精确离线编程而设计。借助虚拟机器人控制器功能,仿真软件可用于:
-
Optimizing robot and equipment placement
优化机器人和设备放置 -
Reach modeling 覆盖面建模
-
Accurate cycle calculations 精确的循环计算
-
Automatic path generation 自动路径生成
-
Collision detection 碰撞检测
-
System configuration 系统配置
-
Condition file editing 条件文件编辑
-
Functional Safety Unit (FSU) configuration
功能安全单元 (FSU) 配置 -
Remote access to real robot controller
远程访问真实的机器人控制器
The virtualized controller also allows the simulation software to operate and display a programming pendant interface identical to the real controller. The VRC completely simulates the Motoman® robot controller software.
虚拟化控制器还允许仿真软件操作并显示与真实控制器相同的编程挂件界面。VRC 完全模拟了 Motoman ® 机器人控制器软件。
With access to the MotoSim EG-VRC Model Library, you can also download a broad library of third party models for your use.
通过访问 MotoSim EG-VRC 模型库,您还可以下载广泛的第三方模型库供您使用。
下载地址:
扫描下方二维码关注并后台回复“MotoSimEG-VRC”,获取下载链接!
欢迎访问https://xmaker.cn/ 创客者V2.0网站获得更多CAX内容!








暂无评论内容